많은 기계 제조업체가 이제 산업용 로봇 팔을 주요 생산 방법으로 사용하기로 선택하고 있습니다. 그러나 생산에 자동화된 로봇 팔을 사용하면 제품 생산 효율성과 제품 품질을 크게 개선할 수 있으며 제품 생산 비용을 줄일 수 있습니다. 산업용 로봇 팔이 생산에서 정확하게 작동할 수 있는지 여부는 실제로 여러 선형 및 각도 위치의 조합인 3차원 공간 위치 지정 문제입니다.
많은 더 간단한 경우 단일 크기가 지배적일 수 있습니다. 단일 선형 또는 각도 양의 위치 오류에 영향을 미치는 요소는 다음과 같습니다.
- 위치 지정 방법 - 위치 지정 방법에는 서로 다른 영향 요인이 있습니다. 예를 들어, 기계적 정지 장치를 위치 지정할 때 위치 지정 정확도는 정지 장치의 강성 및 정지 장치에 닿을 때의 속도와 같은 요인과 관련이 있습니다.
- 위치 속도 - 위치 속도는 위치 정확도에 큰 영향을 미칩니다. 이는 위치 속도가 다를 때 소산되어야 하는 이동 부품의 에너지가 다르기 때문입니다. 일반적으로 위치 오류를 줄이기 위해서는 버퍼 장치의 버퍼링 성능과 버퍼링 효율을 개선하고 구동 시스템을 제어하여 이동 부품을 적시에 감속시키는 등 위치 속도를 합리적으로 제어해야 합니다.
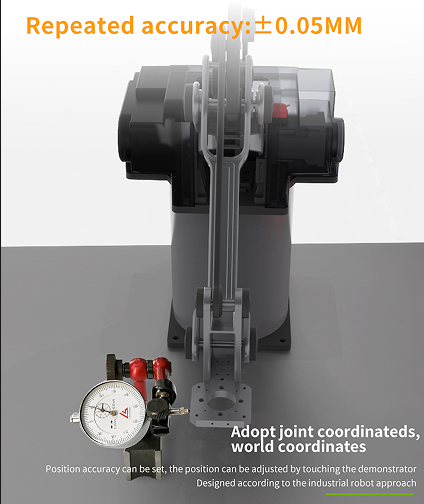
3. 정확도 – 로봇 팔의 제조 정확도와 설치 속도 조절 정확도는 위치 정확도에 직접적인 영향을 미칩니다.
4. 강성 - 조작기 자체의 구조적 강성 및 접촉 강성이 낮으면 진동이 발생하기 쉽고 위치 정확도가 일반적으로 낮습니다.
5. 가동부의 무게 - 가동부의 무게에는 조작기 자체의 무게와 파지되는 물체의 무게가 포함됩니다. 가동부의 무게 변화는 위치 정확도에 더 큰 영향을 미칩니다. 일반적으로 가동부의 무게가 증가함에 따라 위치 정확도가 감소합니다. 따라서 설계 시 가동부 자체의 무게를 줄이는 것뿐만 아니라 작업 중 파지 무게의 변화로 인한 영향도 고려해야 합니다.
6. 구동원 - 유압 및 공압의 압력 변동과 전압, 오일 온도 및 공기 온도의 변동은 조작기의 반복적인 위치 정확도에 영향을 미칩니다. 따라서 전압을 안정시키고 오일 온도를 조정하기 위한 필요한 조치를 취해야 합니다. 예를 들어, 어큐뮬레이터를 사용하여 오일 압력을 안정시키고, 히터 또는 쿨러를 사용하여 오일 온도를 제어하고, 저속에서는 온도 및 압력 보상 유량 제어 밸브를 사용하여 제어합니다.
7. 제어 시스템 - 스위치 제어, 전기 유압 비례 제어 및 서보 제어의 위치 제어 정확도는 다릅니다. 이는 다양한 제어 구성 요소의 정확도와 감도가 다르기 때문일 뿐만 아니라 위치 피드백 장치의 존재 여부와도 관련이 있습니다.