Многие производители оборудования теперь выбирают использование промышленных роботизированных рук в качестве основного метода производства. Однако использование автоматизированных роботизированных рук в производстве может значительно повысить эффективность производства продукции и качество продукции, а также снизить себестоимость продукции. В вопросе о том, может ли промышленная роботизированная рука работать точно в производстве, на самом деле стоит задача позиционирования в трехмерном пространстве, которая представляет собой комбинацию нескольких линейных и угловых позиционирований.
Во многих более простых случаях одна величина может быть доминирующей. Факторы, которые влияют на ошибку позиционирования одной линейной или угловой величины, следующие:
- Методы позиционирования – Различные методы позиционирования имеют различные факторы влияния. Например, при позиционировании механического упора точность позиционирования связана с такими факторами, как жесткость упора и скорость при касании упора.
- Скорость позиционирования – Скорость позиционирования оказывает большое влияние на точность позиционирования. Это происходит потому, что когда скорость позиционирования отличается, энергия движущихся частей, которая должна быть рассеяна, отличается. Как правило, для уменьшения ошибок позиционирования скорость позиционирования должна разумно контролироваться, например, улучшая производительность буферизации и эффективность буферизации буферного устройства, а также управляя системой привода для своевременного замедления движущихся частей.
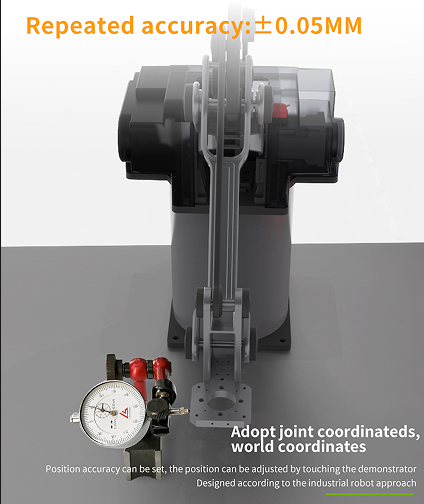
3. Точность. Точность изготовления и точность регулирования скорости установки роботизированной руки напрямую влияют на точность позиционирования.
4. Жесткость. Если жесткость конструкции и контактная жесткость самого манипулятора низкие, он подвержен вибрации, а точность позиционирования, как правило, низкая.
5. Вес подвижных частей – Вес подвижных частей включает вес самого манипулятора и вес захватываемого объекта. Изменения веса подвижных частей оказывают большее влияние на точность позиционирования. Как правило, с увеличением веса подвижных частей точность позиционирования снижается. Поэтому при проектировании необходимо не только уменьшать вес самих подвижных частей, но и учитывать влияние изменений веса захвата во время работы.
6. Источник движения – колебания давления гидравлического и пневматического давления, а также колебания напряжения, температуры масла и температуры воздуха повлияют на точность повторного позиционирования манипулятора. Поэтому следует принять необходимые меры для стабилизации напряжения и регулировки температуры масла. Например, для стабилизации давления масла используется аккумулятор, для контроля температуры масла используется нагреватель или охладитель, а на низкой скорости для контроля используется клапан регулирования расхода компенсации температуры и давления.
7. Система управления – точность управления положением переключающего управления, электрогидравлического пропорционального управления и сервоуправления различна. Это связано не только с различной точностью и чувствительностью различных компонентов управления, но и с наличием или отсутствием устройств обратной связи по положению.