Birçok makine üreticisi artık ana üretim yöntemi olarak endüstriyel sınıf robotik kolları kullanmayı tercih ediyor. Ancak, üretimde otomatik robotik kollar kullanmak ürün üretim verimliliğini ve ürün kalitesini büyük ölçüde artırabilir ve ürün üretim maliyetlerini azaltabilir. Endüstriyel sınıf robotik kolun üretimde doğru bir şekilde çalışıp çalışamayacağı aslında birkaç doğrusal ve açısal konumlandırmanın birleşimi olan üç boyutlu bir uzay konumlandırma sorunudur.
Birçok basit durumda tek bir büyüklük baskın olabilir. Tek bir doğrusal veya açısal niceliğin konumlandırma hatasını etkileyen faktörler şunlardır:
- Konumlandırma yöntemleri – Farklı konumlandırma yöntemlerinin farklı etki faktörleri vardır. Örneğin, mekanik bir durdurucuyu konumlandırırken, konumlandırma doğruluğu durdurucunun sertliği ve durdurucuya temas ettiğinde hız gibi faktörlerle ilişkilidir.
- Konumlandırma hızı – Konumlandırma hızı, konumlandırma doğruluğu üzerinde büyük bir etkiye sahiptir. Bunun nedeni, konumlandırma hızı farklı olduğunda, dağıtılması gereken hareketli parçaların enerjisinin farklı olmasıdır. Genellikle, konumlandırma hatalarını azaltmak için konumlandırma hızı makul bir şekilde kontrol edilmelidir, örneğin tampon cihazının tamponlama performansını ve tamponlama verimliliğini iyileştirmek ve tahrik sistemini hareketli parçaları zamanında yavaşlatacak şekilde kontrol etmek gibi.
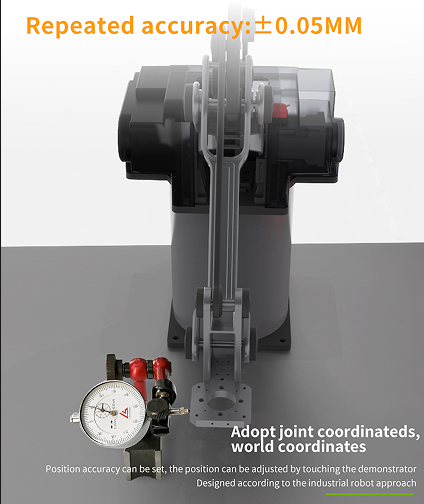
3. Doğruluk – Robotik kolun üretim doğruluğu ve montaj hızı düzenleme doğruluğu, konumlandırma doğruluğu üzerinde doğrudan etkiye sahiptir.
4. Sertlik – Manipülatörün yapısal sertliği ve temas sertliği düşük olduğunda, titreşime eğilimlidir ve konumlandırma doğruluğu genellikle düşüktür.
5. Hareketli parçaların ağırlığı – Hareketli parçaların ağırlığı, manipülatörün kendi ağırlığını ve kavranan nesnenin ağırlığını içerir. Hareketli parçaların ağırlığındaki değişiklikler, konumlandırma doğruluğu üzerinde daha büyük bir etkiye sahiptir. Genellikle, hareketli parçaların ağırlığı arttıkça konumlandırma doğruluğu azalır. Bu nedenle, tasarım yaparken, yalnızca hareketli parçaların ağırlığını azaltmak değil, aynı zamanda çalışma sırasında kavrama ağırlığındaki değişikliklerin etkisini de dikkate almak gerekir.
6. Sürüş kaynağı – hidrolik ve pnömatik basınç dalgalanmaları ve voltaj, yağ sıcaklığı ve hava sıcaklığındaki dalgalanmalar manipülatörün tekrarlayan konumlandırma doğruluğunu etkileyecektir. Bu nedenle, voltajı sabitlemek ve yağ sıcaklığını ayarlamak için gerekli önlemler alınmalıdır. Örneğin, yağ basıncını sabitlemek için bir akümülatör, yağ sıcaklığını kontrol etmek için bir ısıtıcı veya soğutucu kullanılır ve düşük hızda, kontrol için bir sıcaklık ve basınç dengeleme akış kontrol vanası kullanılır.
7.Kontrol sistemi – anahtar kontrolünün, elektro-hidrolik orantılı kontrolün ve servo kontrolün pozisyon kontrol doğruluğu farklıdır. Bu sadece çeşitli kontrol bileşenlerinin farklı doğruluğu ve hassasiyetinden değil, aynı zamanda pozisyon geri bildirim cihazlarının varlığı veya yokluğuyla da ilgilidir.